Almost too much awesome!
Toggle navigation
Alumni
Robots
Research Projects
Publications
Software
Resources
ME 597 – Autonomous Mobile Robotics – Fall 2014
ME 780 – Perception For Autonomous Driving – Spring 2017
ME780 – Nonlinear State Estimation for Robotics and Computer Vision Applications – Spring 2017
ME780-Homework Questions
AscTec Pelican Quadrotor Flight Dataset
Research Projects
Home
Research Projects
ALL
Fast Depth Completion on the CPU
Real-Time 3D Object Detection
Self-Driving Research Platform
Real-Time Filtering of Snow from Lidar Point Clouds
Traffic Light and Sign Detection
Laser SLAM
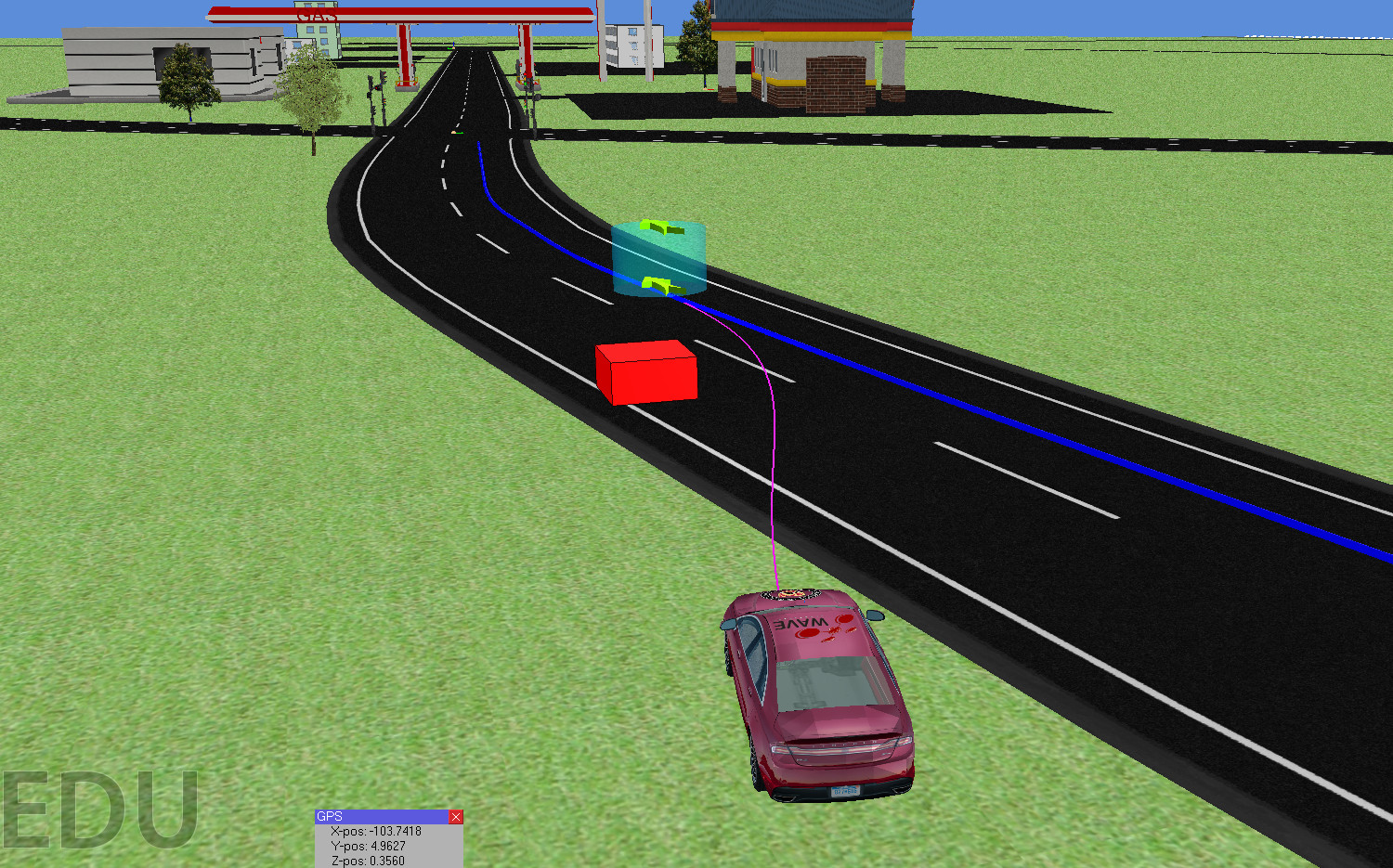
Motion Planning for Autonomous Driving
Lane Marking Detection for Autonomous Driving
Towards Autonomous Driving at the Limit of Friction
Non-Overlapping Field of View Multicamera Cluster SLAM
Multi-Camera Parallel Tracking and Mapping in Snow-Laden Environments
Informed Data Selection and Integrity Monitoring for Visual SLAM
Scan Registration using NDT and Point Cloud Clustering
Modular Deep Recurrent Neural Network
NASA Sample Return Robot Challenge 2012-2014
Transverse Feedback Control for Path Following with Quadrotors