Almost too much awesome!
Lane Marking Detection for Autonomous Driving

Lane Marking Detection for Autonomous Driving
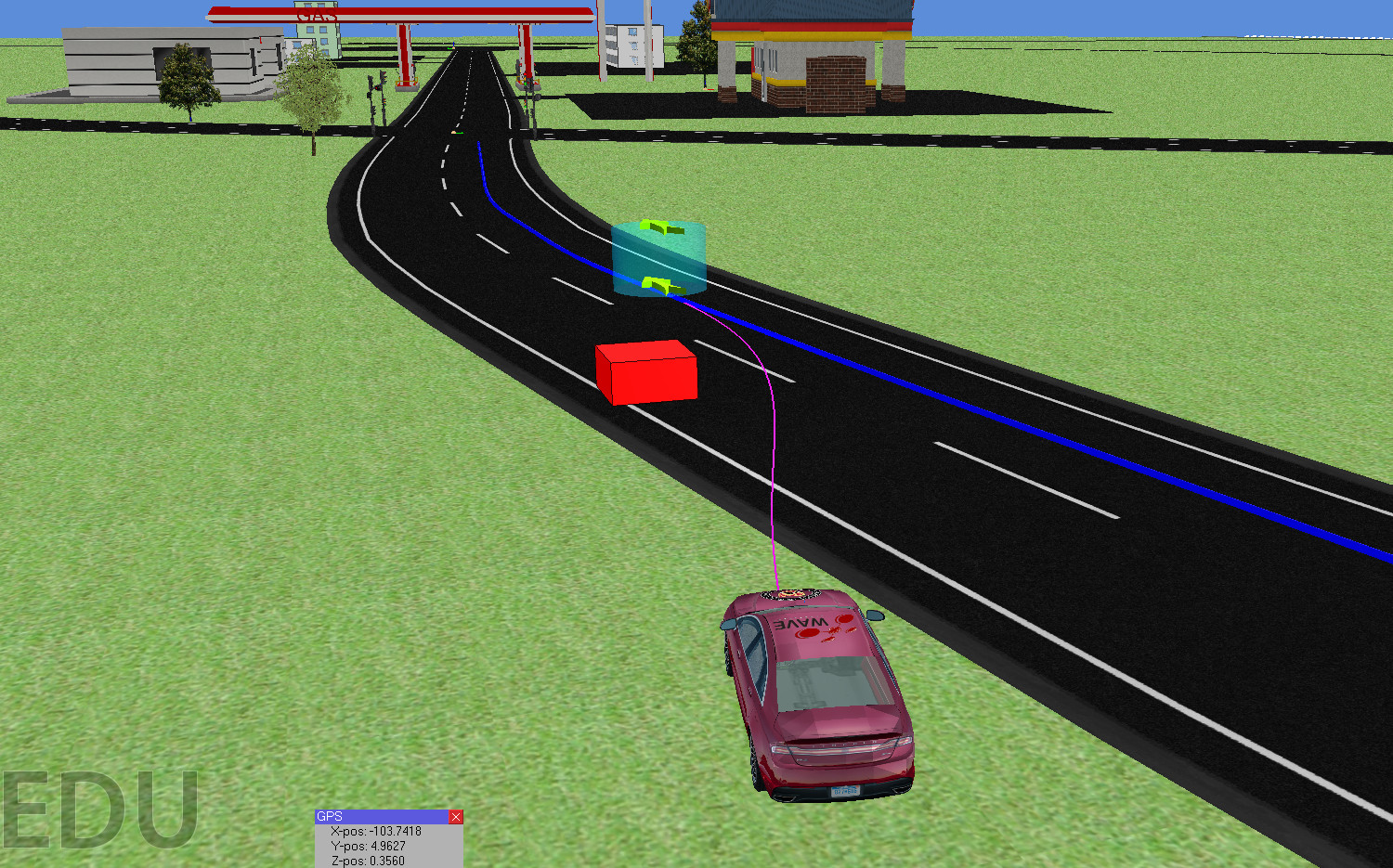
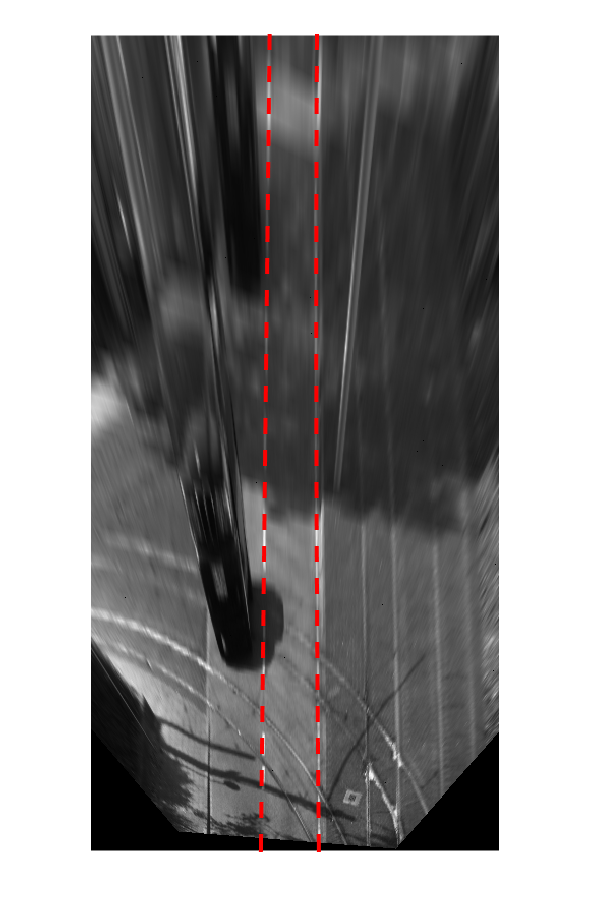 The detection of lane boundary markings is central to the task of autonomous driving. While the detection of high-quality markings is relatively trivial, the detection of faded and degraded lane markings is a much more challenging problem. Detecting lower quality lane markings is also extremely important in countries with harsh winters, such as Canada and the northern United States, as lane marking maintenance does not keep up with their rapid degradation. As such, drivers in these regions encounter extremely degraded lane markings with persistent regularity, and any autonomous driving solution deployed in these regions must also address this challenge.
The detection of lane boundary markings is central to the task of autonomous driving. While the detection of high-quality markings is relatively trivial, the detection of faded and degraded lane markings is a much more challenging problem. Detecting lower quality lane markings is also extremely important in countries with harsh winters, such as Canada and the northern United States, as lane marking maintenance does not keep up with their rapid degradation. As such, drivers in these regions encounter extremely degraded lane markings with persistent regularity, and any autonomous driving solution deployed in these regions must also address this challenge.
Our research in the detection of low-quality lane markings focuses on using a Bayesian Maximum Likelihood Classification approach to select the most likely lane markings present in an image from a set of candidates selected using RANdom SAmple Consensus (RANSAC), with the Bayesian classifier trained using semi-supervised learning. Not only does this approach detect faded lane markings in challenging scenarios, but it also requires minimal human intervention in the training process.
References:
. Stereo Augmented Detection of Lane Marking Boundaries. In 2015 IEEE Conference on Intelligent Transportation Systems (ITSC). Canary Islands, Spain; 2015