Almost too much awesome!
Motion Planning for Autonomous Driving
Motion Planning for Autonomous Driving
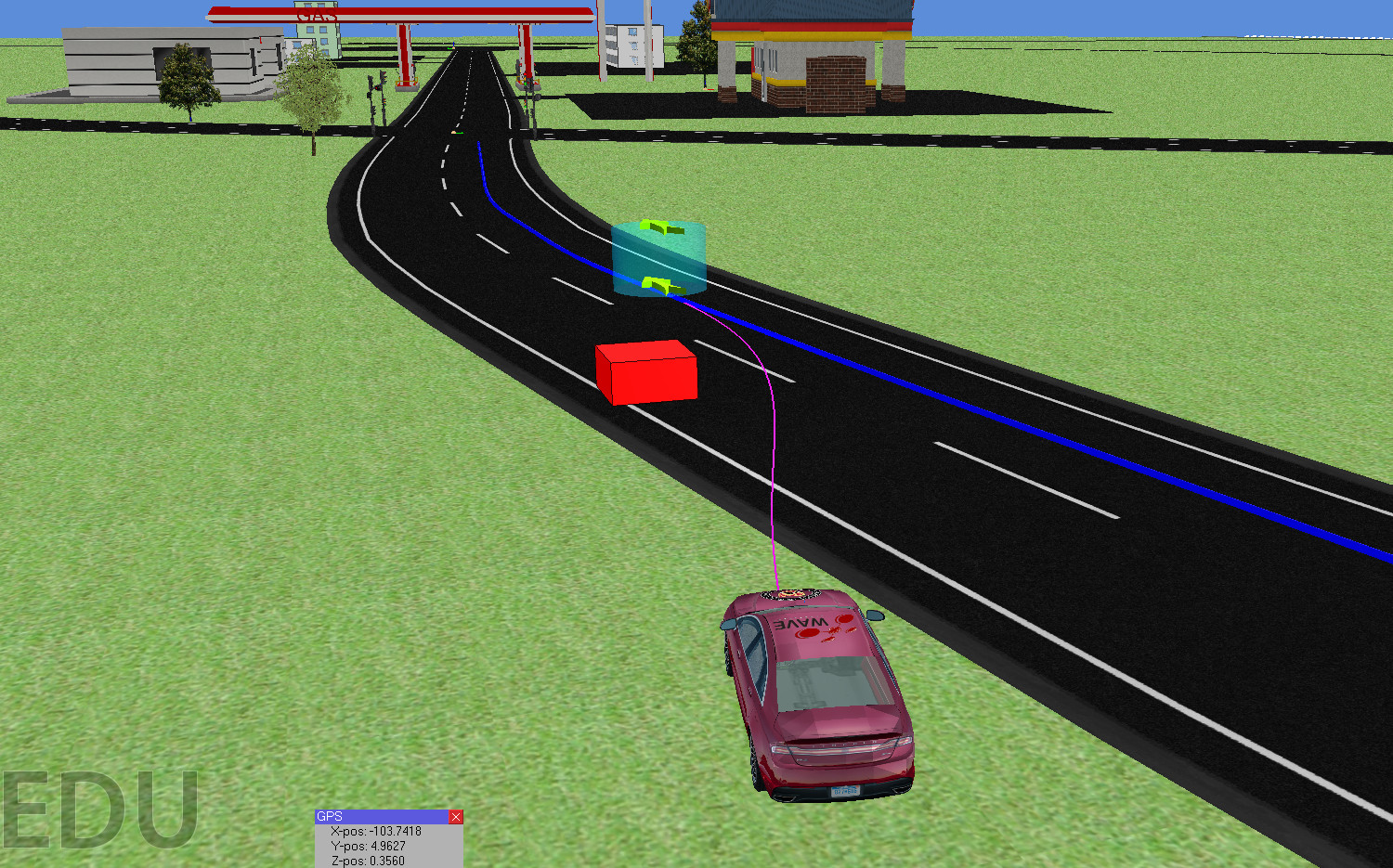
Path planning is a well studied and critical component of any autonomous driving system. The ability to adapt to different situations and generate smooth maneuvers in real-time is essential to maintain safe vehicle operation and ride comfort regardless of the current driving environment. In particular, path planning methods that can accommodate both non-holonomic vehicle motion constraints and obstacle avoidance constraints as efficiently as possible are needed to enable a safety layer that can react quickly in dangerous situations.
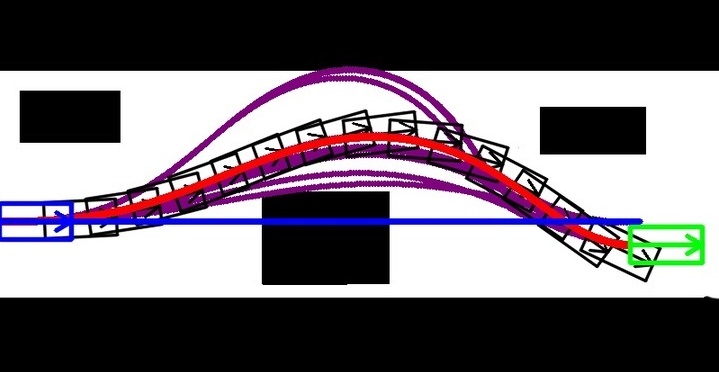
In our research, path planning for autonomous vehicles is formulated as a constrained nonlinear parameter optimization problem with vehicle kinematic and obstacle avoidance constraints in the continuous space domain. Given a naive initial guess, our method is first able to generate a refined initial guess by solving a two point boundary value problem in free space. Then based on the refined initial guess, the method deforms the path according to the performance index while satisfying hard constraints. This approach produces a curvature-constrained, minimal jerk path that is collision-free between initial state and the final state.