Almost too much awesome!
Laser SLAM

Laser SLAM
Laser SLAM is package which allows high fidelity 3D map construction using laser scanners and additional vehicle odometry information. We initially used it for the NASA Sample Return Robot Challange, as a SLAM solution which was able to localize the vehicle to within 10cm accuracy in large, unstructured environments.
We have also used the package to build off-line maps for planetary exploration:
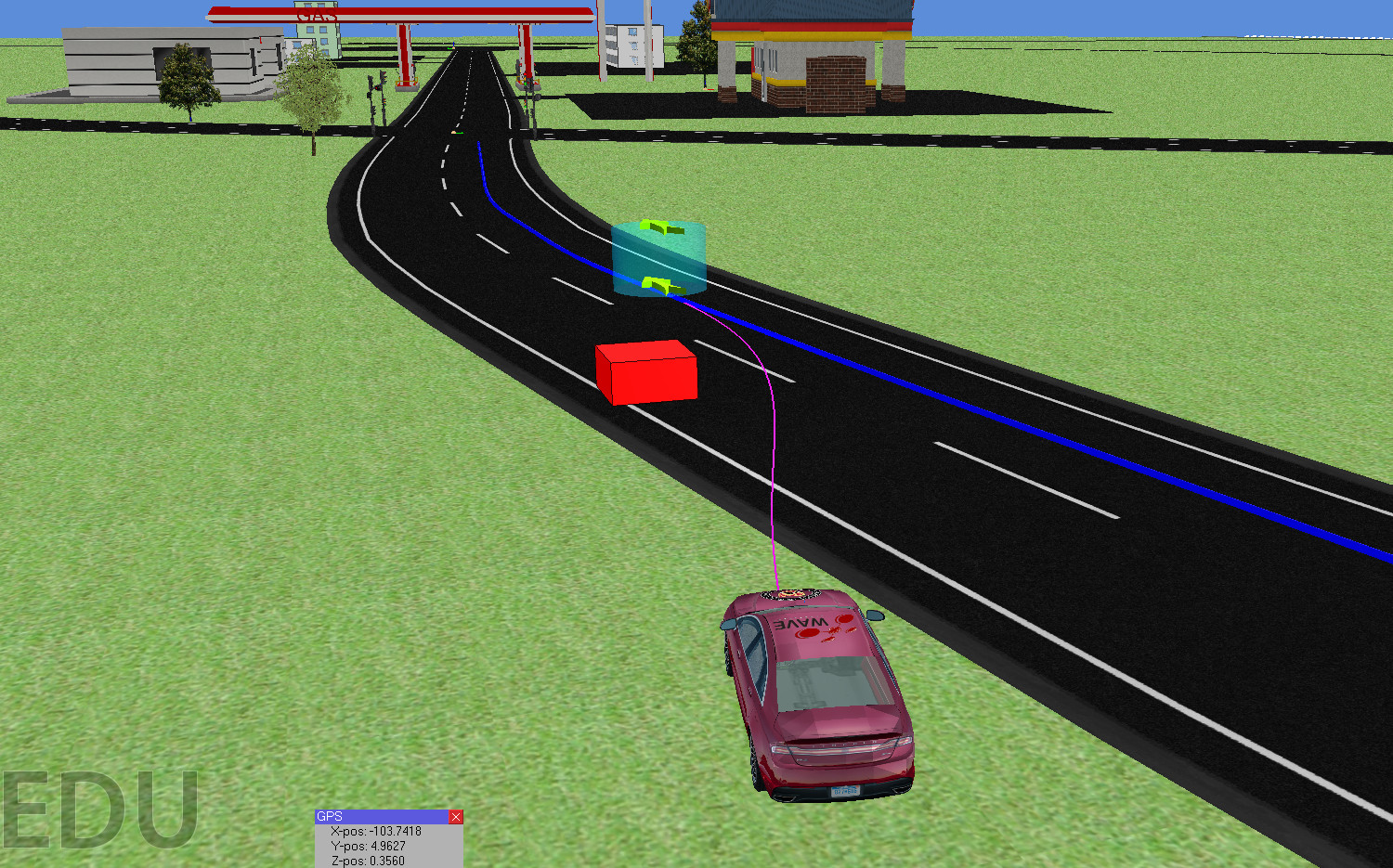
Most recently, the Laser SLAM package has been used to construct high fidelity maps used for vehicle localization of our self driving car:
References:
A. Das, M. Diu, N. Mathew, C. Scharfenberger, J. Servos, A. Wong, J. S. Zelek, D. A. Clausi, and S. L. Waslander, “Mapping, planning and detection strategies for autonomous exploration,” Journal of field robotics, vol. 31, iss. 1, pp. 75-106, 2014.